


")






MODULE CAPTEUR DE LIGNE V2 POUR MICRO BIT

SKU: MBIT024
Disponibilité: ✅ Produit disponible !
19,000 DT
Produits similaires




Le module de suivi de ligne Ring:bit car V2 est un module dédié conçu pour le Ring:bit car V2, il est facile à installer pour réaliser la fonction de suivi de ligne pour le Ring:bit car V2.
Équipé de sondes infrarouges doubles, il peut détecter la distance entre 2 et 12 mm avec précision, ce qui peut réaliser la fonction de suivi de ligne autour des cercles, la détection des lignes noires et la détection du bord.
CARACTÉRISTIQUES
Le micro:bit peut le piloter directement avec la tension d’entrée de ce module de 3 V à 5 V.
Il n’a besoin que d’un seul port E/S dans le Ring:bit avec des ports GVS standard à 3 broches.
Il utilise la lumière infrarouge pour détecter avec une forte capacité anti-interférence.
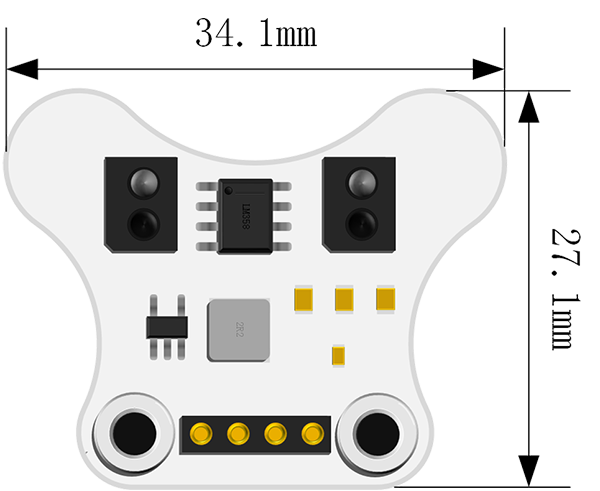
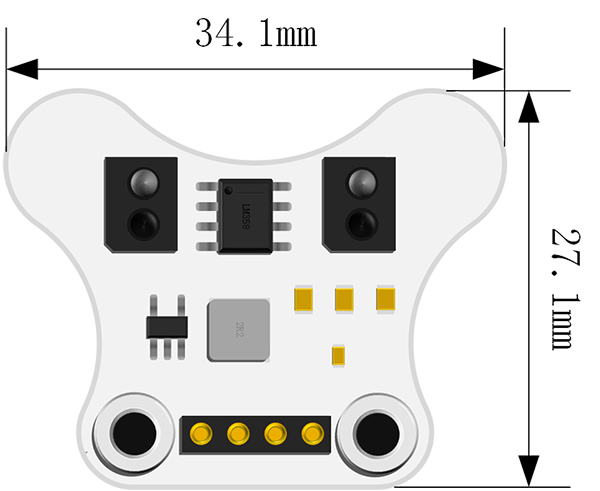
DIMENSION
SPÉCIFICATION
| Articles | Paramètres | Remarques |
|---|---|---|
| Nom | Module de suivi de ligne Ring:bit car V2 | – |
| UGS | EF03424 | – |
| Tension de fonctionnement | 3-5 V CC | – |
| Port | Ports de broches dédiés à la voiture Ring:bit | Fixé par des vis |
| Types de signaux de sortie | Simulation | – |
| Distance effective | 2 à 12 mm | – |
| Dimension | 34,15 x 27,20 mm | – |
| Poids net | 4,7 g | – |
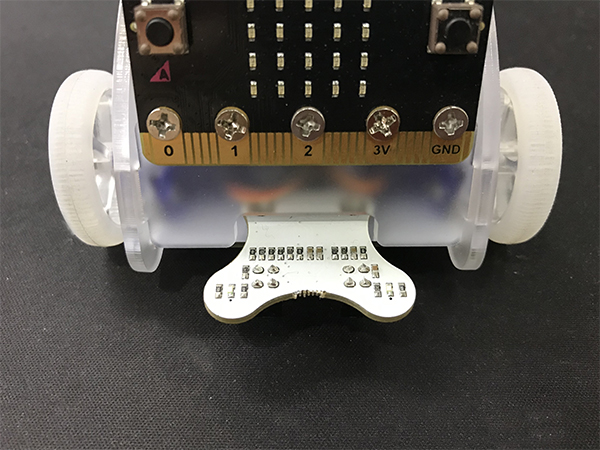
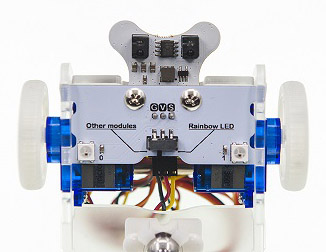
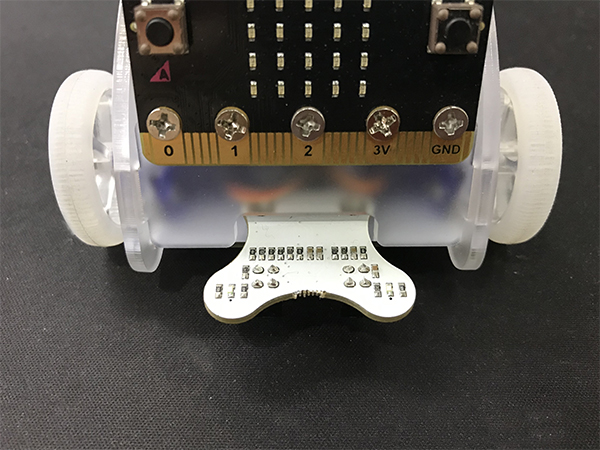
CONNEXION DU MATÉRIEL
La première étape consiste à insérer ce module dans la carte mère du Ring:bit car V2.
L’étape suivante consiste à fixer le module avec les deux vis.
L’extension est terminée.
LOGICIEL
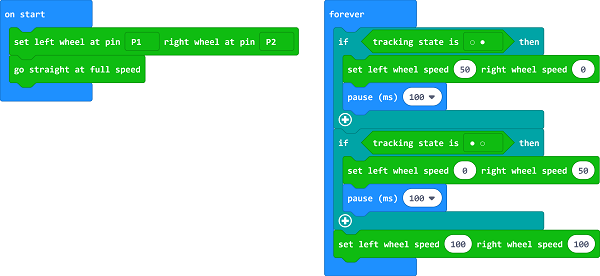
Programmez un code de suivi de ligne simple dans le makecode.
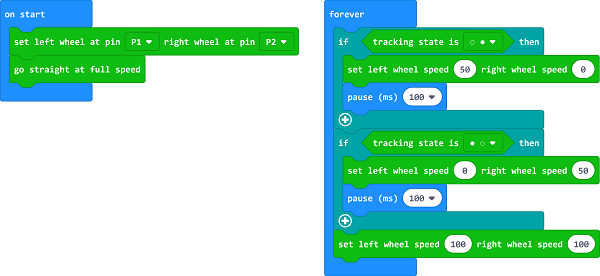
Le port de connexion équivalent pour les roues gauche et droite est P1 et P2 au démarrage.
Lorsque la sonde de détection gauche s’écarte de la ligne noire, la roue droite s’arrête de bouger et la roue gauche s’ajuste pour revenir à la ligne noire à une vitesse de 50.
La sonde de détection droite fonctionne de la même manière que la sonde de détection gauche.
Lorsque les deux sondes de détection détectent la ligne noire, la voiture avance à une vitesse de 100.
PROGRAMMATION
Liens pour le code : https://makecode.microbit.org/_Jh2RVDMRwDz1
Vous pouvez également télécharger le code directement ci-dessous :
7. Module de flux de ligne #
7.1. Introduction
- Le module de suivi de ligne Ring:bit car V2 est un module dédié conçu pour le Ring:bit car V2 , il est facile à installer pour réaliser la fonction de suivi de ligne pour le Ring:bit car V2 .
- Équipé de doubles sondes infrarouges, il peut détecter la distance entre 2 et 12 mm avec précision, ce qui peut réaliser la fonction de suivi de ligne autour des cercles, la détection des lignes noires et la détection du bord.

7.2. Caractéristiques
- Le micro:bit peut le piloter directement avec la tension d’entrée de ce module en 3V~5V.
- Il n’a besoin que d’un seul port IO avec des ports GVS standard à 3 broches.
- Il utilise la lumière infrarouge pour détecter avec une forte capacité anti-interférence.
7.3. Paramètre
| Articles | Paramètre | Remarques |
|---|---|---|
| Nom | Module de suivi de ligne Ring:bit car V2 | – |
| UGS | EF03424 | – |
| Tension de fonctionnement | 3-5 V CC | – |
| Port | Ports de broches dédiés à la voiture Ring:bit | Fixé par des vis |
| Types de signaux de sortie | Simulation | – |
| Distance effective | 2 à 12 mm | – |
| Dimension | 34,15 x 27,20 mm | – |
| Poids net | 4,7 g | – |
7.4. Dimensions :
7.5. Démarrage rapide
Connexion matérielle
- La première étape consiste à insérer ce module dans la carte de base du Ring:bit car V2.
- L’étape suivante consiste à fixer le module avec les deux vis.
- Complété.
Programmation de logiciels
- Programmez un code simple de suivi de ligne dans le makecode .
- Initiez les ports de connexion des roues gauche et droite à P1 et P2.
- Lorsque la sonde de détection gauche détecte un écart par rapport à la ligne noire, la roue droite s’arrête de bouger et la roue gauche s’ajuste pour revenir à la ligne noire à une vitesse de 50.
- La sonde de détection droite fonctionnerait de la même manière que la sonde de détection gauche.
Liens : https://makecode.microbit.org/_hYH1Rd697TFf
Vous pouvez également télécharger le code directement ci-dessous :
Résultat
- La voiture Ring:bit roule lentement autour du cercle.
7.6. FAQ
| Marque | Elecfreaks |
|---|
Based on 0 reviews
Only logged in customers who have purchased this product may leave a review.




There are no reviews yet.