


")





CARTE DE DEVELOPPEMENT ARDUINO ALL IN ONE ROMEO V2 AVEC PILOTE MOTEUR INTEGRE

SKU: DEV034
Disponibilité: ✅ Produit disponible !
112,000 DT
Produits similaires
-
ARDUINO
ARDUINO UNO REV4 Wi-Fi
Rupture de stock
L’Arduino UNO R4 WiFi fusionne le microprocesseur RA4M1 de Renesas avec l’ESP32-S3 d’Espressif, créant ainsi un outil tout-en-un pour les créateurs avec une puissance de traitement améliorée et une gamme diversifiée de nouveaux périphériques. Avec ses capacités Wi-Fi® et Bluetooth® intégrées, l’UNO R4 WiFi permet aux créateurs de s’aventurer dans des possibilités créatives illimitées. De plus, cette carte polyvalente dispose d’une matrice LED 12×8 intégrée pratique et d’un connecteur Qwiic, offrant un espace suffisant pour l’innovation et libérer la créativité. Cette combinaison dynamique permet aux créateurs de transformer leurs idées en réalité et d’élever leurs projets à des sommets sans précédent.
SKU: ABX00087




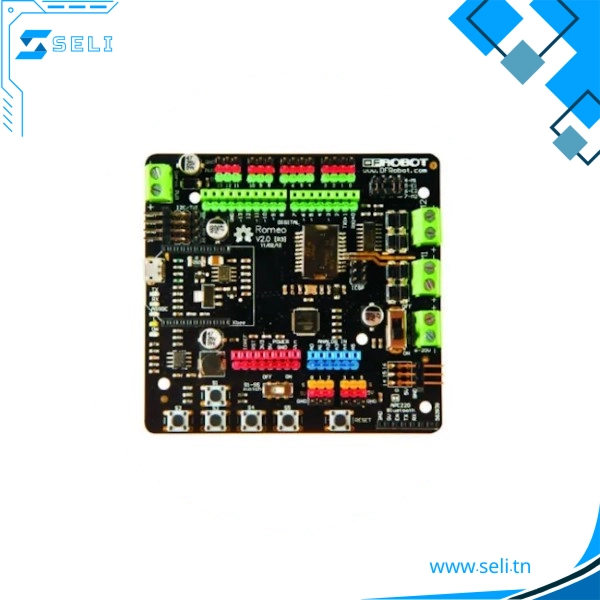
DFRobot Romeo V2 contrôleur tout-en-un ATmega32U4 pilote de moteur intégré/prise Xbee/extension de capteur Compatible avec arduino
Introduction
Romeo V2-une carte de commande de robot avec pilote de moteur (compatible avec Arduino), il est spécialement conçu pour les applications robotiques et les appareils étendus. Romeo bénéficie de la plate-forme open source Arduino, elle est supportée par des milliers de projets open source, et peut facilement être étendue avec des Shields compatibles Arduino. Le pilote de moteur DC 2 voies intégré et la prise Xbee vous permettent de démarrer votre projet immédiatement sans avoir besoin d’un pilote de moteur supplémentaire ou d’un bouclier sans fil.
Une autre amélioration de Romeo V2 est qu’il prend en charge le contrôle du moteur pas à pas.
Romeo V2-une carte de commande de robot avec pilote de moteur (compatible avec Arduino) se comporte comme Arduino Leonardo basé sur la puce ATmega32u4, vous pouvez le programmer directement à partir de l’Arduino IDE 1.0.1 ou version ultérieure. En raison de l’ATmega32U4 comme c’est le seul microcontrôleur, Romeo V2 est simple et facile à utiliser. Le chipset 32U4 gère directement l’USB, des bibliothèques de codes sont disponibles qui permettent à la carte d’émuler un clavier d’ordinateur, une souris, et plus encore en utilisant le protocole USB-HID très intéressant! Le meilleur avantage est que ATmega32u4 dispose de deux ports série qui permettent de télécharger des croquis sans supprimer les modules sans fil. Le débogage n’est plus une tâche pénible.
Historique des versions
Romeo V2 améliore également l’alimentation, il a maintenant un interrupteur pour sélectionner la source d’alimentation soit à partir de USB ou alimentation externe.
Romeo V2.2 redessine le système d’alimentation pour améliorer la stabilité du circuit ADC.
Guide de sélection du microcontrôleur DFRobot
Photos
Caractéristiques
Tension d’entrée de fonctionnement large
Prise en charge directe des modules Xbee et XBee facteur de forme wifi, Bluetooth et RF
Interrupteur marche/arrêt pour contrôler l’alimentation du système à partir de l’alimentation du moteur externe
3 extensions d’E/S numériques (D14-D16)
L’interrupteur S1 – S5 remplace le capuchon de saut, permet une utilisation gratuite pour le GPIO.
Micro USB au lieu A-B connecteur USB
Port d’extension du capteur analogique: Orange pour Signal, Rouge pour Vcc, Noir pour GND
Remarque: Le mappage des broches du port du capteur analogique sur Romeo v2 est différent de l’ancienne version. Veuillez sélectionner “Arduino Leonardo” lorsque vous utilisez “Arduino IDE”.
Spécification
Alimentation CC: alimenté par USB ou externe 6V ~ 23V CC
Sortie CC: 5V(2A) / 3.3V CC
Courant de sortie continu de conducteur de moteur: 2A
Microcontrôleur: ATmega32u4
Chargeur de démarrage: Arduino Leonardo
Compatible avec l’Arduino R3 pin mapping
Entrées analogiques: A0-A5, A6 – A11 (sur les broches numériques 4, 6, 8, 9, 10 et 12)
PWM: 3, 5, 6, 9, 10, 11 et 13. Fournir une sortie PWM 8 bits
5 entrées clés pour les tests
Entrée d’alimentation externe à détection/commutation automatique
Interface série
Niveau TTL
USB
Support mâle et femelle Pin Header
Prise Xbee intégrée
Prises intégrées pour le module RF APC220 et le module DF-Bluetooth
Trois jeux de broches d’interface I2C/TWI (deux en-têtes de broches à 90 °)
Conducteur bidirectionnel de moteur avec le courant maximum 2A
Un moteur pas à pas avec un courant maximum de 2A
Taille: 89x84x14mm (3.50×3.31×0.55 “)
Projets
Raspberry Internet Rover (basé sur la plate-forme Pirate 4WD et Romeo V2)
(http://www.linuxcircle.com/2013/02/28/raspberry-internet-rover-part-1-robotics/)
Robot bipède Hongkong utilisant Romeo
(http://www.youtube.com/watch?v=l0jfT5ZUnw8&feature=related)
RC Hack basé sur Romeo v1
(http://www.youtube.com/watch?v=wuPd1-DBBE0)
Documents
Guide de sélection du microcontrôleur DFRobot: https://www.dfrobot.com/blog-1541.html
Wiki (Romeo V2-All dans un contrôleur) : https://www.dfrobot.com/wiki/index.php/Romeo_V2-All_in_one_Controller_(R3)_(SKU:DFR0225)
Schéma Romeo V2: https://image.dfrobot.com/image/data/DFR0225/Romeo%20V2.0%20sch.pdf
Conseils pour changer la cartographie des broches du câble du capteur: https://www.dfrobot.com/blog-191.html
Bibliothèque de moteur pas à pas Romeo: https://image.dfrobot.com/image/data/DFR0225/Stepper_Romeo.zip
Liste d’expédition
V2-All Romeo dans un contrôleur x1
| Marque | DFROBOT |
|---|
Based on 0 reviews
Only logged in customers who have purchased this product may leave a review.



There are no reviews yet.