


")





-9%


BOUCLIERS
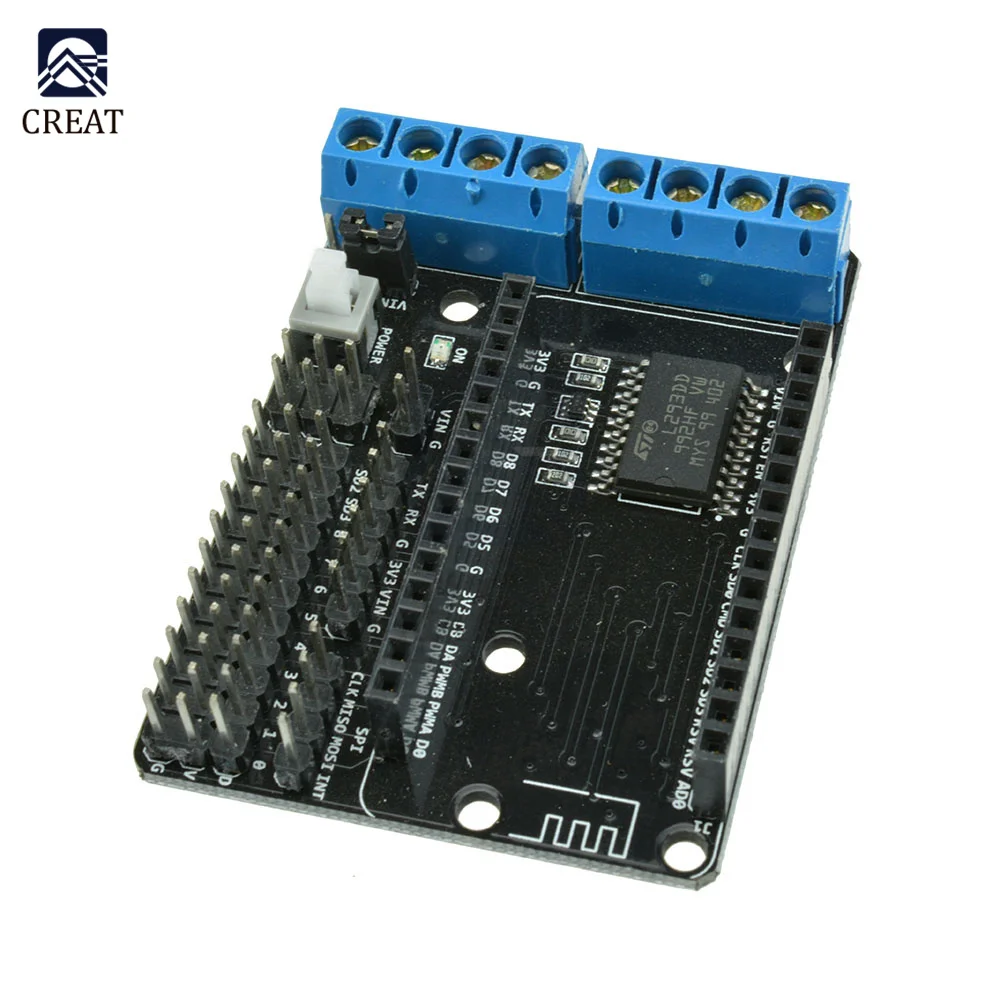
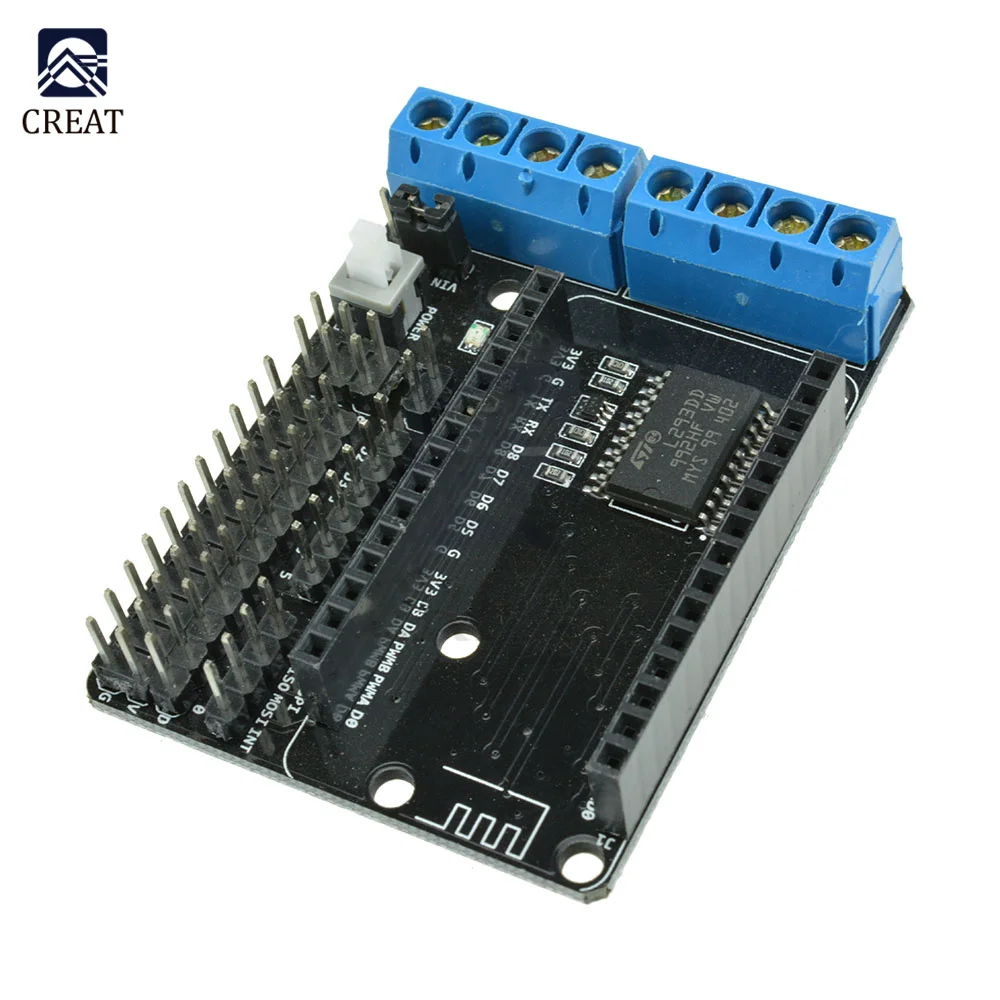
BOUCLIER MOTEURS POUR NODE MCU 8266 ESP-12E
SKU: BOU014
Disponibilité: ✅ Produit disponible !
L293D L293 Pour ESP8266 ESP-12E Haute Puissance H-Bridge Tech Pour Ardu37Sans Fil WIFI NodeMcu Moteur Pilote Shield Board
10,000 DT 11,000 DT
Produits similaires




Caractéristique:
Puissance d’entrée:
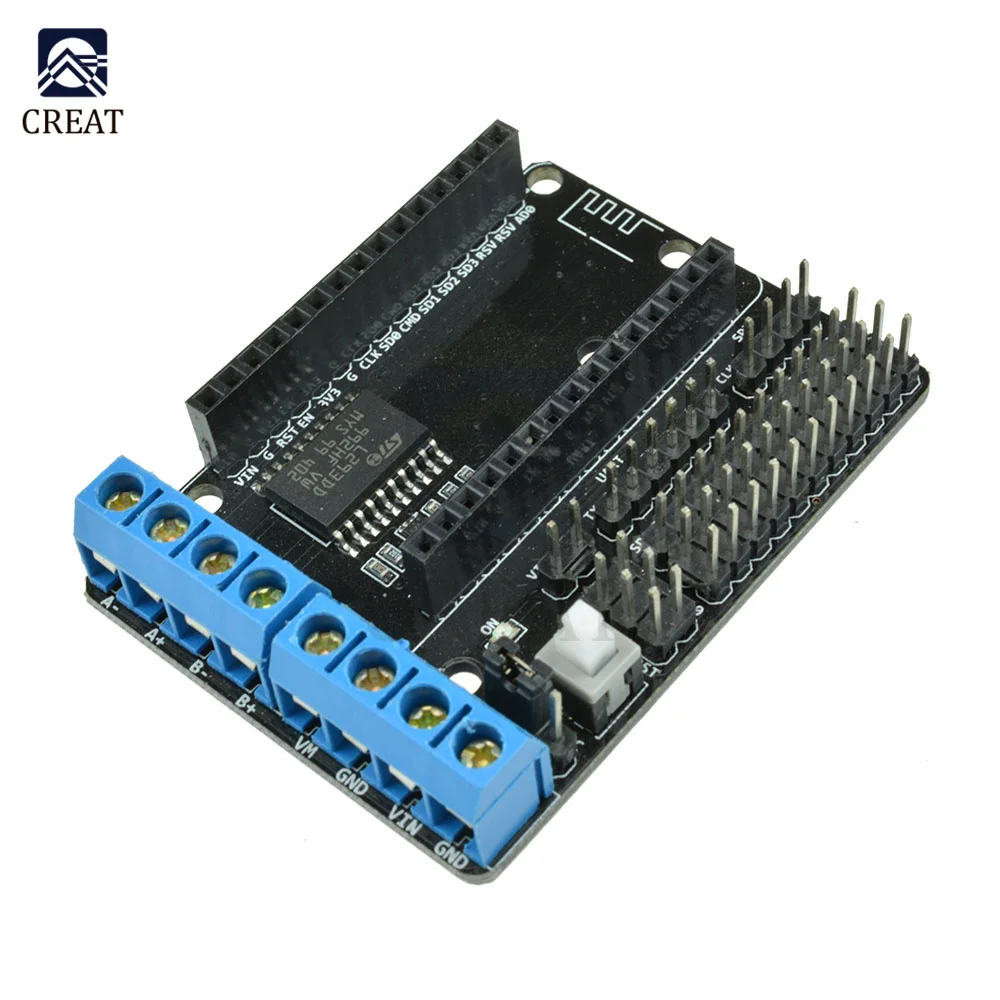
Alimentation moteur (VM): 4.5V ~ 36V, peut être alimenté séparément
Puissance de contrôle (VIN): 4.5V ~ 9V (10VMAX), peut être alimenté séparément
Le module fournit un sous-circuit de court-circuit (court-circuit VM et VIN), vous pouvez facilement utiliser une puissance (doit 4.5V ~ 9V) tout en complétant l’entraînement et le contrôle du moteur
Courant de fonctionnement logique Iss: ≤ 60mA (Vi = L), ≤ 22mA (Vi = H)
Conduisez une partie du courant de travail Io: ≤ 1.2A
Dissipation maximale de la puissance: 4W (T = 90 â „ ф)
Niveau d’entrée du signal de commande: Élevé: 2.3V ≤ VIH≤ VIN; Faible: -0.3V ≤ VIL≤ 1.5V
Température de fonctionnement: -25 â „ | | + 125 â
Type d’entraînement: Double pilote de pont en H haute puissance
Port de contrôle du kit de développement ESP12E: D1, D3 (moteur A); D2, D4 (moteur B)
Développer le moteur à entraînement direct bidirectionnel entraîné par un moteur bidirectionnel
Interrupteur d’alimentation à bord
Puissance de moteur, séparation de puissance de contrôle; Dans l’expérience, en court-circuitant le bloc la fusion,
Alimentation moteur (VM): 4.5V ~ 36V, peut être alimenté séparément
Puissance de contrôle (VIN): 4.5V ~ 9V (10VMAX), peut être alimenté séparément
Le module fournit un sous-circuit de court-circuit (court-circuit VM et VIN), vous pouvez facilement utiliser une puissance (doit 4.5V ~ 9V) tout en complétant l’entraînement et le contrôle du moteur
Courant de fonctionnement logique Iss: ≤ 60mA (Vi = L), ≤ 22mA (Vi = H)
Conduisez une partie du courant de travail Io: ≤ 1.2A
Dissipation maximale de la puissance: 4W (T = 90 â „ ф)
Niveau d’entrée du signal de commande: Élevé: 2.3V ≤ VIH≤ VIN; Faible: -0.3V ≤ VIL≤ 1.5V
Température de fonctionnement: -25 â „ | | + 125 â
Type d’entraînement: Double pilote de pont en H haute puissance
Port de contrôle du kit de développement ESP12E: D1, D3 (moteur A); D2, D4 (moteur B)
Développer le moteur à entraînement direct bidirectionnel entraîné par un moteur bidirectionnel
Interrupteur d’alimentation à bord
Puissance de moteur, séparation de puissance de contrôle; Dans l’expérience, en court-circuitant le bloc la fusion,
VIN et VM court, tandis que l’alimentation du moteur et de la carte de commande
Avis:
Lorsqu’il est inséré dans le module ESP-12E,
Veuillez noter la direction conforme à une antenne de carte d’extension
L’utilisation de modules courts qui peuvent simultanément contrôler la carte et le moteur.
L’utilisation de modules courts qui peuvent simultanément contrôler la carte et le moteur.
Le paquet comprend:
1 x L293D Module de blindage de moteur Wifi pour Arduino NodeMcu ESP8266 ESP-12E

Based on 0 reviews
Only logged in customers who have purchased this product may leave a review.


There are no reviews yet.